
2023/05/29
【知識文章】除了AGV,你還必須知道SLAM !
上次跟大家介紹了AGV的導引方式,在文章中也跟大家提到,雷射導引的方式,而雷射導引中又分為雷射反射導引以及雷射場景導引。 雷射反射導引是利用雷射光束以及反射板之間來計算機器當前的位置,雷射場景導引則是發射無數個座標點來了解當前的位置以及整個環境的地圖。 本次文章就跟大家介紹,SLAM雷射場景導引的運作方法以及發展歷程。 SLAM全名為Simultaneous Localization and Mapping,從字面上即可看到它有兩個任務,一是要知道計算當下的定位,二是了解身旁的環境來建構地圖。它必須計算出自身以及周遭環境的相對空間,以避免運行過程中撞到障礙物。

而SLAM本身又是如何運行呢?透過自身的傳感器進行環境跟自身空間的感測。
SLAM的傳感器發展可以從1980年開始,早期是利用聲納方式,透過聲納回傳以了解自身與障礙物之間的距離,後來則發展為雷射方法,並有了2D及3D的類別。
透過2D或3D的激光雷達,可以測量出精確的角度、位置, 且掃描的範圍廣度為270度,數據更新的速率也非常高,但激光雷達價格較為昂貴,安裝時對機器的結構會有所要求。
相較於激光雷達,視覺SLAM傳感器的相機,較為輕便、便宜,可提供豐富的信息, 對特徵的區分度較高,但因為要處理大量的訊息,必須要有很高的計算能力,不過當今硬體設備已可解決這點。
現今流行於SLAM的系統運作方法分為前後端, 前端處理與數據有相關聯的事務,主要工作為實時的位置跟蹤及圖像處理,當IMU的信息進來時,也能一起處理。 而後端則是對前端的輸出結果進行優化,透過濾波理論或者優化理論來得到最優的位置和地圖。
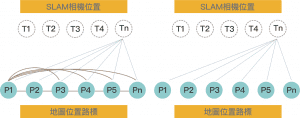
濾波理論的SLAM運作方法如下左圖所示, 每個時刻都會對上每個座標點,而只要新增一個座標點,其他座標點都會進行更新, 當新的座標點不斷加入,這些矩陣規模就越來越大,龐大的資料量,便會導致計算耗時, 我們可以看到下左圖,各個座標之間也會有所關聯,當運行時間越長,座標點越多,資料就會越龐大。 因此便會採用優化計算算法,時刻與座標可以形成一個子集, 就不需要每增加一個座標點而更新數據,所以現在的SLAM系統大都採用優化的計算方法。 可以看到下右圖,地圖位置的點之間並沒有連結線。
大致了解SLAM的運行方式後,我們將在下篇告訴你,SLAM的演進、歷程,以及技術的更新變化!
Comments
0 Likes


